Last updated: 11/02/2026
Click Here to Read the WhitepaperProject repo: https://github.com/Matthew-K-Chua/SiemensSIF408CameraDetection
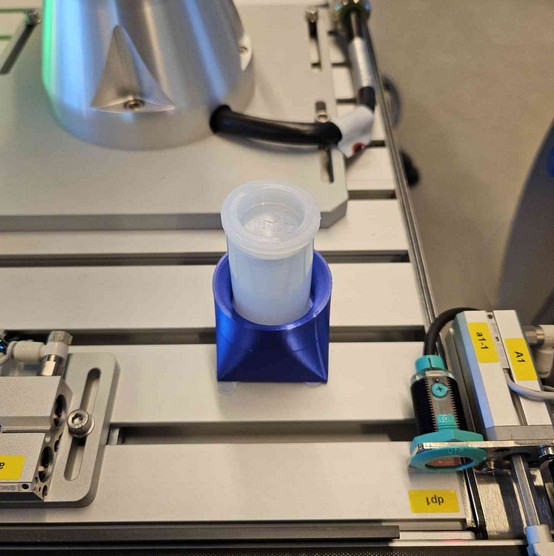
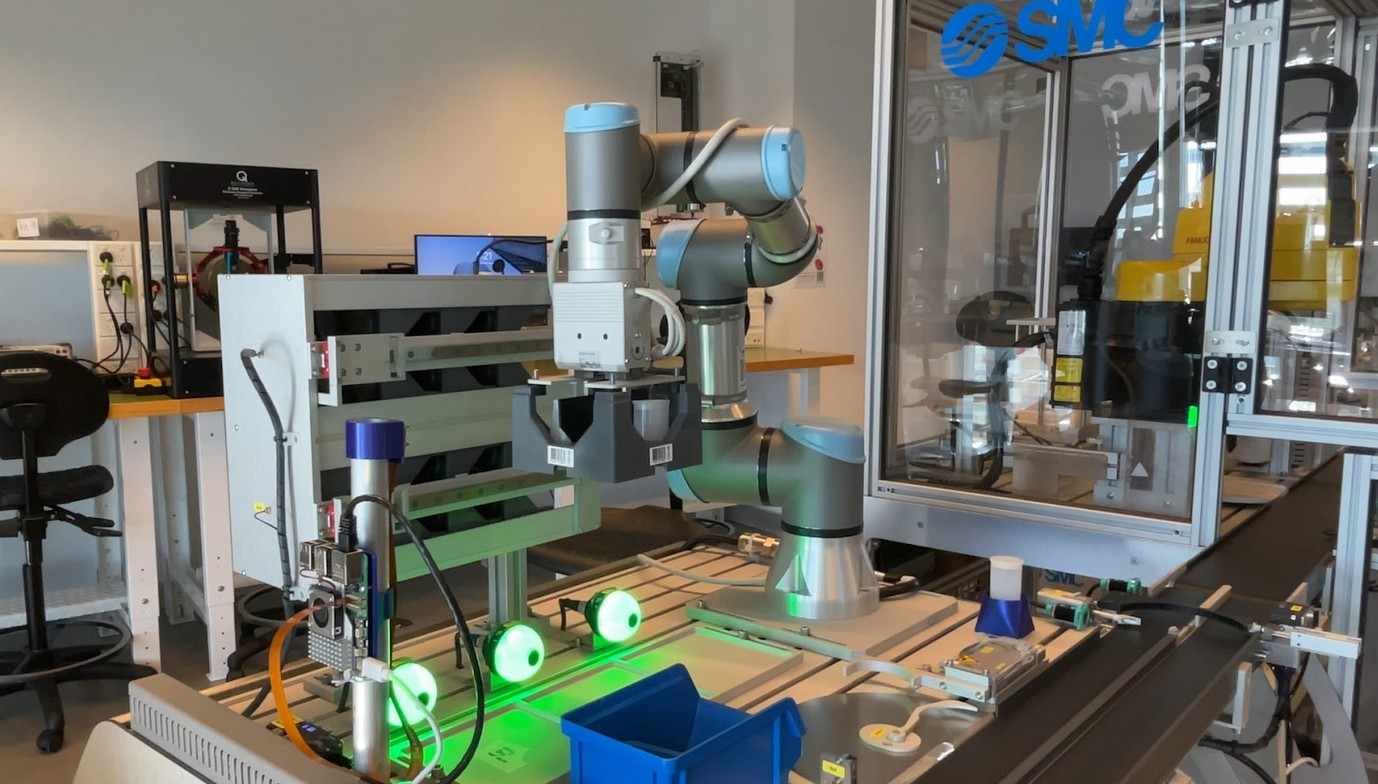
During the UTS 48560 Automation Studio course, my team was tasked with enhancing the reliability of the SIF-408 palletizing station within a modular Industry 4.0 "Smart Factory" environment. The existing system suffered from intermittent alignment issues where cylindrical containers were placed at a tilt, leading to downstream failures and line stoppages at subsequent stations. To solve this, I designed and implemented a closed-loop quality control subsystem that transformed the station’s operation from a standard "open-loop" pick-and-place task into a robust, self-correcting process.
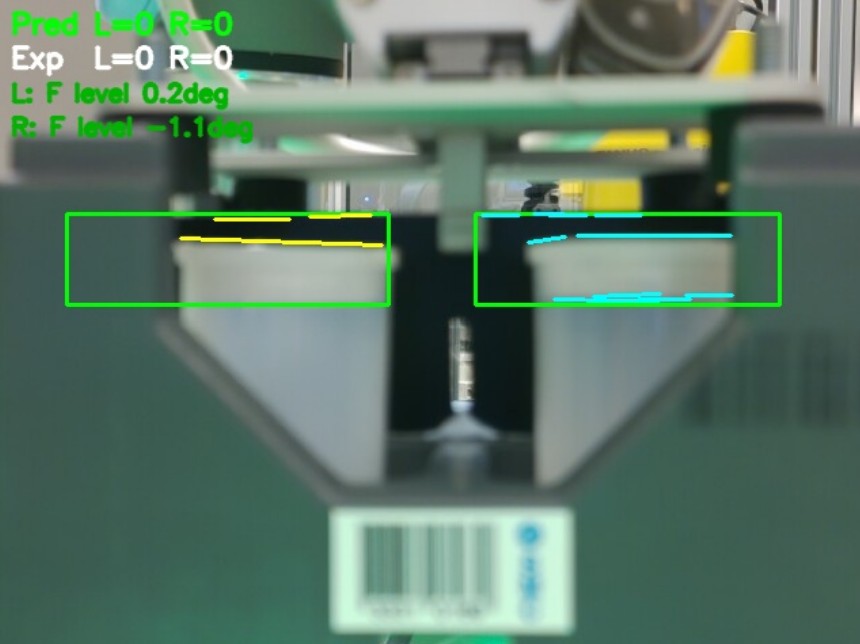
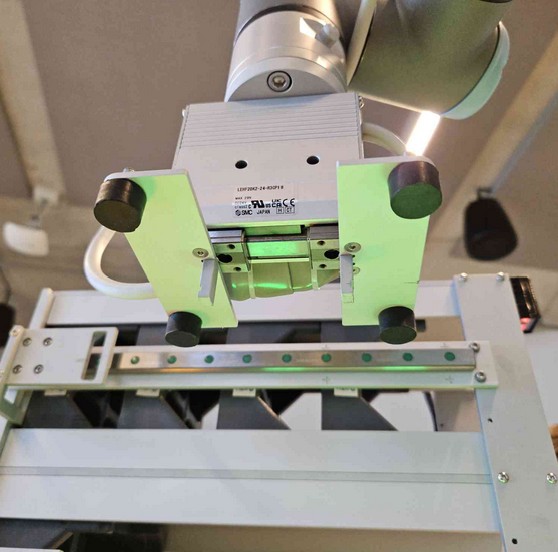
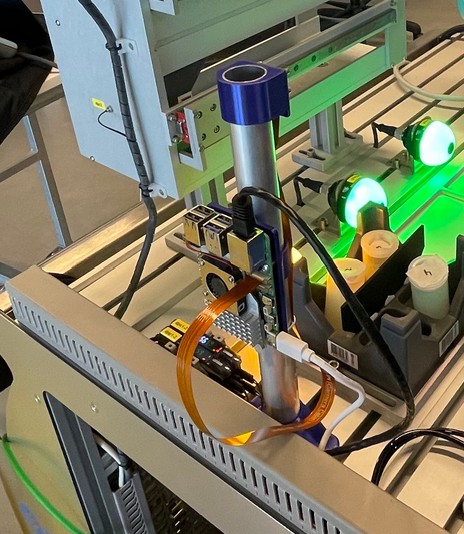
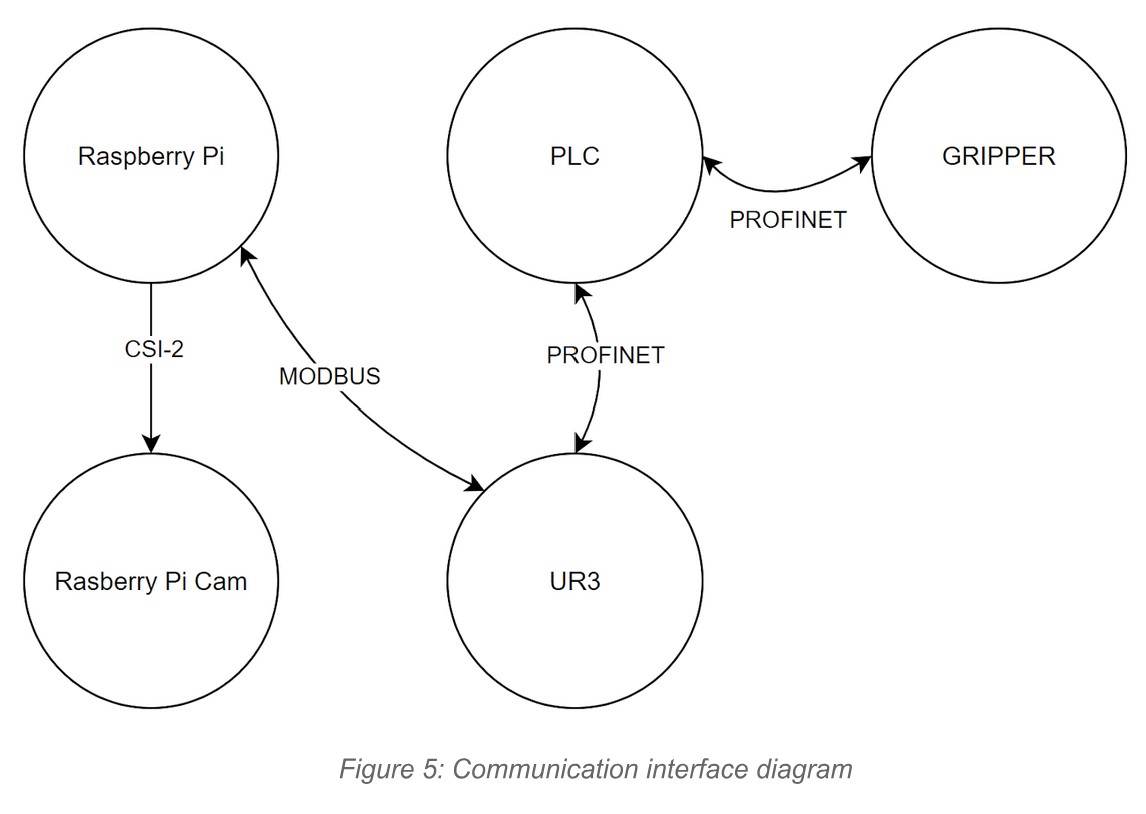
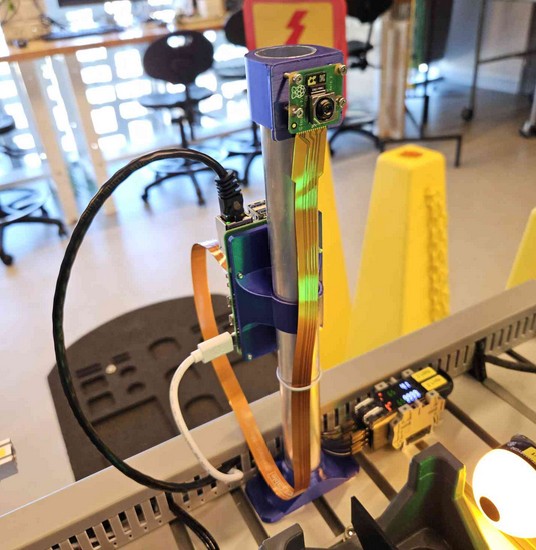
Technically, the project required the extensive reverse-engineering of Siemens S7-1500 PLC logic (Structured Text) and UR3 collaborative robot scripts. I integrated a Raspberry Pi 5 running a custom Python-based OpenCV algorithm to detect container tilt angles via a side-mounted camera. Communication was handled through a multi-protocol architecture: the vision system interfaced with the UR3 via Modbus TCP, while the station’s core coordination and SMC gripper control remained on a Profinet backbone. This allowed the UR3 to present the pallet for inspection and, if a fault was detected, execute a corrective "push" routine to reseat the containers.
The final implementation successfully achieved 100% detection of deliberate misalignments during validation. By prioritizing system uptime over a marginal increase in cycle time, the project mitigated the risk of high-impact downstream disruptions. This work highlights my ability to bridge the gap between computer vision and traditional industrial automation, specifically in retrofitting legacy PLC state machines with modern, data-driven inspection tools.
The project is set to be displayed as an exemplar project for 2026 students. View the final repo here by my teammate Marcus: https://github.com/marcus-frisch/sif408_camera